Sift : Find Keypoints SIFT: KeyPoint找寻、定位与优化
KeyPoint找寻、定位与优化
KeyPoint找寻
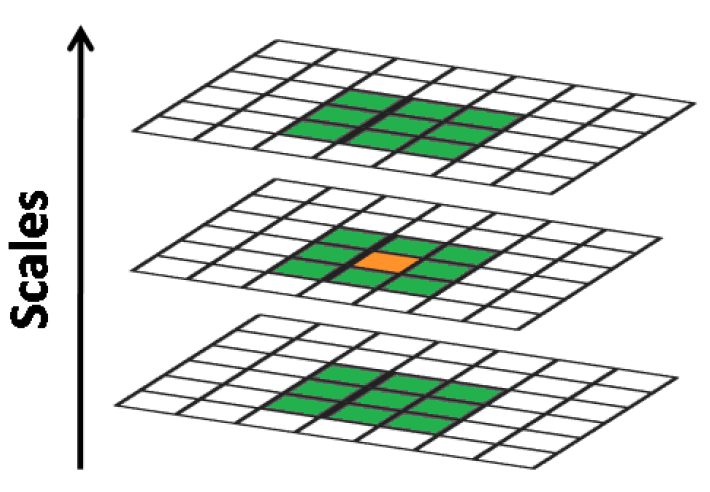
极值的检测是在 DoG 空间进行的,检测是以当前点为中心,3pixel X 3pixel X 3pixel 的立方体为邻域,判断当前点是否为局部最大或最小。如下图所示,橘黄色为当前检测点,绿色点为其邻域。因为要比较当前点的上下层图像,所以极值检测从 DoG 每层的第 2 幅图像开始,终止于每层的倒数第 2 幅图像(第 1 幅没有下层,最后 1 幅没有上层,无法比较)。
KeyPoint定位
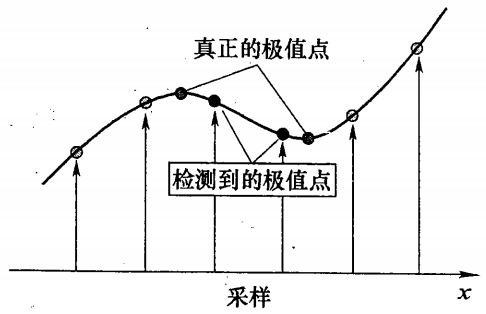
以上极值点的搜索时在离散空间中进行的,检测到的极值点并不是真正意义上的极值点。如下图所示,连续空间中极值与离散空间的区别。通常通过插值的方式,利用离散的值来插值,求取接近真正的极值的点。
对于一维函数,利用泰勒级数,将其展开为二次函数:
$$f(x)\approx f(0)+f'(0)x+1/2f''(0)x^{2}$$
对于二维函数,泰勒展开为:
$$ f(x,y)\approx f(0,0)+(\frac{\partial f}{\partial x}x+\frac{\partial f}{\partial y}y)+\frac{1}{2}(\frac{\partial^2 f}{\partial x^2}x^2 + 2\frac{\partial^2 f}{\partial x \partial y}xy + \frac{\partial^2 f}{\partial y^2}y^2) $$
矩阵表示为:
$$ f(\begin{bmatrix}x \\ y \end{bmatrix}) \approx f(\begin{bmatrix}0 \\ 0 \end{bmatrix})+\begin{bmatrix}\frac{\partial f}{\partial x} & \frac{\partial f}{\partial y} \end{bmatrix} \begin{bmatrix}x\\ y\end{bmatrix} +\frac{1}{2}\begin{bmatrix}x & y\end{bmatrix} \begin{bmatrix}\frac{\partial^{2} f}{\partial x^{2}} & \frac{\partial^{2} f}{\partial x \partial y} \\ \frac{\partial^{2} f}{\partial x \partial y} & \frac{\partial^{2} f}{\partial y^{2}} \end{bmatrix} \begin{bmatrix}x\\ y\end{bmatrix} $$
矢量表示为: $$f(\textbf{x})\approx f(\textbf{0})+\frac{\partial f}{\partial \textbf{x}})^T \textbf{x} + \frac{1}{2} \textbf{x}^T \frac{\partial^{2} f}{\partial \textbf{x}^{2}}\textbf{x} $$
求取 $f(\textbf{x})$ 的极值,只需求取 $\frac{\partial f}{\partial \textbf{x}}=0$。对于极值,$x,y,\sigma$ 三个变量,即为三维空间。利用三维子像元插值,设其函数为 $D(x,y,\sigma)$,令 $\textbf{x} = (x, y, \sigma)^{T}$,那么在第一节中找到的极值点进行泰勒展开为(式-1)如下:
$$ D(\textbf{x})=D+(\frac{\partial D}{\partial \textbf{x}})^T \textbf{x} + \frac{1}{2} \textbf{x}^T \frac{\partial^{2} D}{\partial \textbf{x}^{2}}\textbf{x} $$
其中 $D$ 为极值点的值,$(\partial D/\partial \textbf{x})^{T}$ 为在极值点各自变量的导数,$(\partial^{2} D/\partial \textbf{x}^{2})$ 为其在展开点相应的矩阵。对上式求导,另 $\partial D(\textbf{x})/\partial \textbf{x} = \textbf{0}$,结果如下式,对应的 $\hat{\textbf{x}}$ 向量即为真正极值点偏离插值点的量。求解得(式-2)如下:
$$ \hat{\textbf{x}}=-\frac{\partial^{2} D^{-1}}{\partial \textbf{x}^2} \frac{\partial D}{\partial \textbf{x}} $$
最终极值点的位置即为插值点 $\textbf{x}+\hat{\textbf{x}}$,且多次迭代可以提高精度(一般为5次迭代)。
问题 1: 《图像局部不变性特征与描述》中提到,对于偏移量ˆx任何方向上偏移大于0.5的特征点,要删除该点。
对于Lowe的原文为:
If the offset ˆx is larger than 0.5 in any dimension, then it means that the extremum lies closer to a different sample point. In this case, the sample point is changed and the interpolation performed instead about that point.
个人认为原作者并未说要删除此类点,只是说这个点偏移了,所以需要插值来进行替换。在个人研究的源码中,OpenCV sift的源码中,并未删除上述类型的点,在vlfeat的开源代码中,也未删除上述点。
KeyPoint优化
对KeyPoint定位后,要剔除一些不好的KeyPoint,那什么是不好的KeyPoint的呢?
- DoG响应较低的点,即极值较小的点。
- 响应较强的点也不是稳定的特征点。DoG对图像中的边缘有较强的响应值,所以落在图像边缘的点也不是稳定的特征点。一方面图像边缘上的点是很难定位的,具有定位的歧义性;另一方面这样的点很容易受到噪声的干扰变得不稳定。
对于第一种,只需计算矫正后的点的响应值D(ˆx),响应值小于一定阈值,即认为该点效应较小,将其剔除。将(式-2)带入(式-1),求解得: $$ D(\hat{\textbf{x}})=D+ \frac{1}{2} \frac{\partial D^{T}}{\partial \textbf{x}} \hat{\textbf{x}} $$ 在Lowe文章中,将 $\left | D(\hat{\textbf{x}}) \right | < 0.03$(图像灰度归一化为[0,1])的特征点剔除。
对于第二种,利用 Hessian 矩阵来剔除。一个平坦的 DoG 响应峰值在横跨边缘的地方有较大的主曲率,而在垂直边缘的地方有较小的主曲率。主曲率可以通过 2×2 的 Hessian 矩阵 H 求出:
$$ H(x,y)=\begin{bmatrix} D_{xx}(x,y) & D_{xy}(x,y)\\ D_{yx}(x,y) & D_{yy}(x,y) \end{bmatrix} $$
D 值可以通过求临近点差分得到。H 的特征值与 D 的主曲率成正比,具体可参见 Harris 角点检测算法。为了避免求具体的值,我们可以通过 H 将特征值的比例表示出来。令 $\alpha =\lambda_{max}$ 为最大特征值,$\beta =\lambda_{min}$ 为最小特征值,那么:
$$Tr(H)=D_{xx}+D_{yy}=\alpha +\beta $$ $$Det(H)=D_{xx}D_{yy}-D_{xy}D_{yx} = \alpha \cdot \beta $$
$Tr(H)$ 为矩阵 H 的迹,$Det(H)$ 表示 H 的行列式。令 $\gamma = \alpha / \beta$ 表示最大特征值与最小特征值的比值,则有:
$$ \frac{Tr(H)^{2}}{Det(H)}=\frac{(\alpha+\beta)^{2}}{\alpha \cdot \beta}=\frac{(\gamma+1)^{2}}{\gamma}$$
上式与两个特征值的比例有关。随着主曲率比值的增加,$\frac{(\gamma+1)^{2}}{\gamma}$ 也会增加。我们只需要去掉比率大于一定值的特征点。Lowe 论文中去掉 $\gamma=10$ 的点。
参考资料:
- David G. Lowe Distinctive Image Features from Scale-Invariant Keypoints
- 王永明 王贵锦 《图像局部不变性特征与描述》
blog comments powered by Disqus